Sistemi di rilevamento dei dati dinamici del veicolo
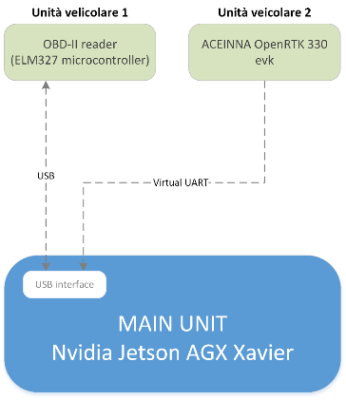
I dati dinamici del veicolo sono grandezze fondamentali al fine di realizzare un sistema intelligente per l’identificazione del comportamento di guida. Il sottosistema prototipale, realizzato per l’acquisizione dei parametri dinamici del veicolo, è composto da due unità che si occupano di rilevare in tempo reale i dati veicolari di interesse per il progetto.
 L’unità veicolare 1 acquisisce i dati dal mezzo attraverso l’interfaccia OBD-II (On Board Diagnostics). I dati trasferiti attraverso questa interfaccia seguono degli standard, ma non possono essere direttamente utilizzabili da personal computer o smart devices.
L’unità veicolare 1 acquisisce i dati dal mezzo attraverso l’interfaccia OBD-II (On Board Diagnostics). I dati trasferiti attraverso questa interfaccia seguono degli standard, ma non possono essere direttamente utilizzabili da personal computer o smart devices.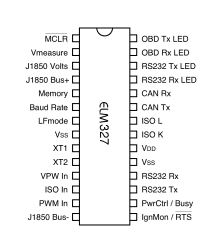 Per tale motivo un microcontrollore PIC18F2480 pre-programmato ELM327, legge i messaggi dalla porta OBD-II del veicolo ed effettua la traduzione dei messaggi in segnali RS232 eliminando l’ambiguità di comprendere quale protocollo viene utilizzato sul veicolo.
Per tale motivo un microcontrollore PIC18F2480 pre-programmato ELM327, legge i messaggi dalla porta OBD-II del veicolo ed effettua la traduzione dei messaggi in segnali RS232 eliminando l’ambiguità di comprendere quale protocollo viene utilizzato sul veicolo.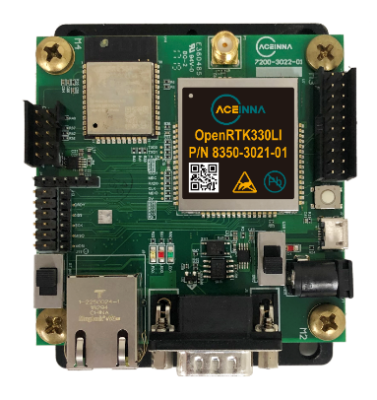 L’unità veicolare 2 fornisce i parametri relativi alla posizione del mezzo. é La soluzione di posizionamento utilizza un sistema integrato GNSS e IMU (Inertial Measurement System) coadiuvati da un ricevitore RTK. L’intero sistema garantisce, grazie all’integrazione di algoritmi Real-Time Kinematic (RTK) e Precise Point Positioning (PPP), la precisione necessaria anche in carenza di segnale GNSS (gallerie, canyon) ad una frequenza di misurazione pari a 100 Hz.
L’unità veicolare 2 fornisce i parametri relativi alla posizione del mezzo. é La soluzione di posizionamento utilizza un sistema integrato GNSS e IMU (Inertial Measurement System) coadiuvati da un ricevitore RTK. L’intero sistema garantisce, grazie all’integrazione di algoritmi Real-Time Kinematic (RTK) e Precise Point Positioning (PPP), la precisione necessaria anche in carenza di segnale GNSS (gallerie, canyon) ad una frequenza di misurazione pari a 100 Hz.